#include <commandsProc.hxx>
Public Member Functions | |
| CommandOrderInputPorts (std::string node, std::string port, int isUp) | |
| int | getRank () |
 Public Member Functions inherited from YACS::HMI::Command Public Member Functions inherited from YACS::HMI::Command | |
| Command () | |
| virtual bool | execute () |
| the command is executed a first time after its registration for undo redo, then on redo More... | |
| virtual bool | reverse (bool isNormal=true) |
| Reverse action: undo. More... | |
| virtual bool | executeSubOnly () |
| execute only sub commands in a reverse action More... | |
| std::string | recursiveDump (int level=0) |
| void | addSubCommand (Command *command) |
| bool | isNormalReverse () |
Protected Member Functions | |
| virtual bool | localExecute () |
| virtual bool | localReverse () |
| virtual std::string | dump () |
Protected Attributes | |
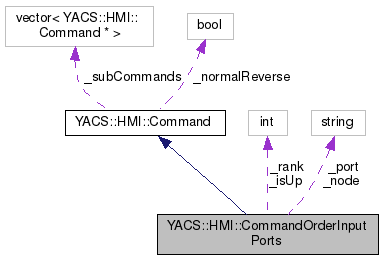
| std::string | _node |
| std::string | _port |
| int | _isUp |
| int | _rank |
| Protected Attributes inherited from YACS::HMI::Command | |
| std::vector< Command * > | _subCommands |
| bool | _normalReverse |
Detailed Description
Definition at line 345 of file commandsProc.hxx.
Constructor & Destructor Documentation
| CommandOrderInputPorts::CommandOrderInputPorts | ( | std::string | node, |
| std::string | port, | ||
| int | isUp | ||
| ) |
move up or down a port in the list of ports of a node. if isUp = 0, move down one step, if isUp = n>0, move up n steps.
Definition at line 1598 of file commandsProc.cxx.
References DEBTRACE.
Member Function Documentation
|
protectedvirtual |
Reimplemented from YACS::HMI::Command.
Definition at line 1606 of file commandsProc.cxx.
References _isUp, _node, _port, and PMMLBasicsTestLauncher::ret.
|
inline |
|
protectedvirtual |
Implements YACS::HMI::Command.
Definition at line 1614 of file commandsProc.cxx.
References _isUp, YACS::HMI::GuiContext::_mapOfSubjectDataPort, YACS::HMI::GuiContext::_mapOfSubjectNode, _node, _port, _rank, DEBTRACE, YACS::ENGINE::ElementaryNode::edOrderInputPorts(), YACS::ENGINE::ComposedNode::getChildByName(), YACS::HMI::GuiContext::getCurrent(), YACS::ENGINE::ElementaryNode::getInputPort(), YACS::ENGINE::DataPort::getName(), YACS::HMI::GuiContext::getProc(), YACS::ENGINE::ElementaryNode::getSetOfInputPort(), YACS::HMI::ORDER, setErrorMsg(), YACS::HMI::SYNCHRO, YACS::Exception::what(), and YASSERT.
|
protectedvirtual |
Implements YACS::HMI::Command.
Definition at line 1682 of file commandsProc.cxx.
References _isUp, YACS::HMI::GuiContext::_mapOfSubjectDataPort, YACS::HMI::GuiContext::_mapOfSubjectNode, _node, _port, _rank, DEBTRACE, YACS::ENGINE::ElementaryNode::edOrderInputPorts(), YACS::ENGINE::ComposedNode::getChildByName(), YACS::HMI::GuiContext::getCurrent(), YACS::ENGINE::ElementaryNode::getInputPort(), YACS::ENGINE::DataPort::getName(), YACS::HMI::GuiContext::getProc(), YACS::ENGINE::ElementaryNode::getSetOfInputPort(), YACS::HMI::ORDER, setErrorMsg(), YACS::HMI::SYNCHRO, YACS::Exception::what(), and YASSERT.
Member Data Documentation
|
protected |
Definition at line 358 of file commandsProc.hxx.
Referenced by dump(), localExecute(), and localReverse().
|
protected |
Definition at line 356 of file commandsProc.hxx.
Referenced by dump(), localExecute(), and localReverse().
|
protected |
Definition at line 357 of file commandsProc.hxx.
Referenced by dump(), localExecute(), and localReverse().
|
protected |
Definition at line 359 of file commandsProc.hxx.
Referenced by getRank(), localExecute(), and localReverse().
The documentation for this class was generated from the following files:
- src/hmi/commandsProc.hxx
- src/hmi/commandsProc.cxx