#include <saemul.hxx>
Public Member Functions | |
| Emulator (void) | |
| ~Emulator (void) | |
| void | destroyAll (void) |
| void | push (long id, std::vector< double > &cal) |
| long | getCurrentId (void) |
| std::vector< double > * | getCurrentOut (void) |
| void | run (void) |
Protected Member Functions | |
| std::vector< double > * | eval (std::vector< double > &x) |
Protected Attributes | |
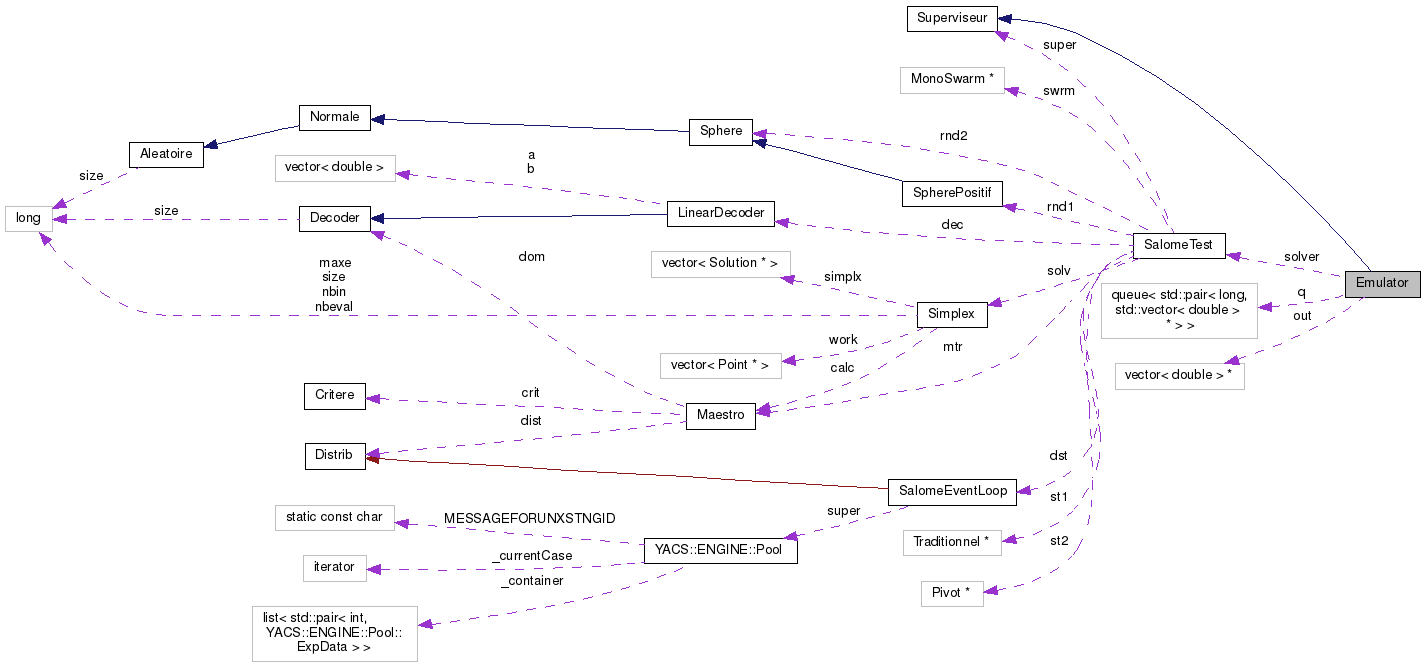
| SalomeTest * | solver |
| std::queue< std::pair< long, std::vector< double > * > > | q |
| std::vector< double > * | out |
Detailed Description
Definition at line 31 of file saemul.hxx.
Constructor & Destructor Documentation
| Emulator::Emulator | ( | void | ) |
Definition at line 26 of file saemul.cxx.
References solver.
| Emulator::~Emulator | ( | void | ) |
Definition at line 31 of file saemul.cxx.
References destroyAll(), and solver.
Member Function Documentation
|
virtual |
Implements Superviseur.
Definition at line 37 of file saemul.cxx.
References q.
Referenced by ~Emulator().
|
protected |
Definition at line 74 of file saemul.cxx.
References CORBAEngineTest::i, and NBGENE.
Referenced by getCurrentId().
|
virtual |
Implements Superviseur.
Definition at line 57 of file saemul.cxx.
|
virtual |
|
virtual |
| void Emulator::run | ( | void | ) |
Definition at line 116 of file saemul.cxx.
References SalomeTest::finish(), SalomeTest::next(), q, SalomeTest::readFromFile(), solver, and SalomeTest::start().
Referenced by main().
Member Data Documentation
|
protected |
Definition at line 35 of file saemul.hxx.
Referenced by getCurrentId(), and getCurrentOut().
|
protected |
Definition at line 34 of file saemul.hxx.
Referenced by destroyAll(), getCurrentId(), push(), and run().
|
protected |
Definition at line 33 of file saemul.hxx.
Referenced by Emulator(), run(), and ~Emulator().
The documentation for this class was generated from the following files:
- src/engine/Plugin/saemul.hxx
- src/engine/Plugin/saemul.cxx