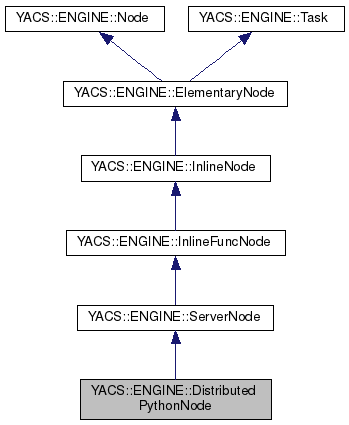
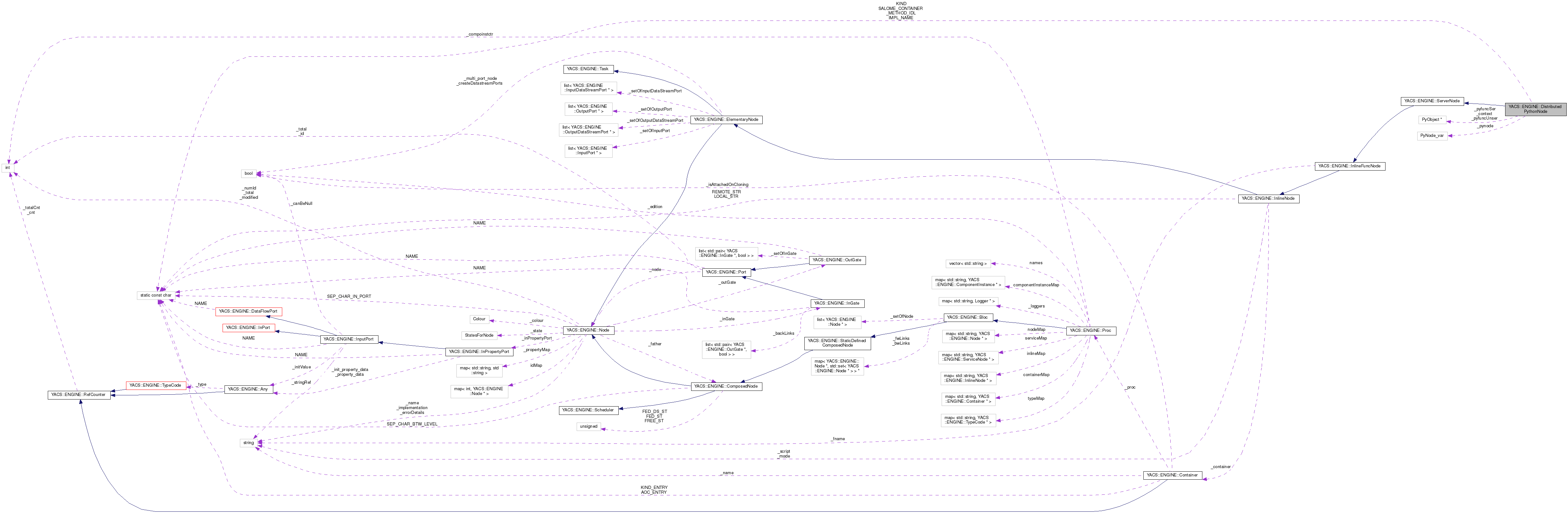
#include <DistributedPythonNode.hxx>
Public Member Functions | |
| DistributedPythonNode (const std::string &name) | |
| DistributedPythonNode (const DistributedPythonNode &other, ComposedNode *father) | |
| ~DistributedPythonNode () | |
| void | execute () |
| void | load () |
| std::string | getEffectiveKindOfServer () const |
| this method returns the type of container expected More... | |
| std::string | getKind () const |
| this method returns the type of input/output expected More... | |
| ServerNode * | createNode (const std::string &name) const |
| virtual std::string | typeName () |
 Public Member Functions inherited from YACS::ENGINE::ServerNode Public Member Functions inherited from YACS::ENGINE::ServerNode | |
| ServerNode (const std::string &name) | |
| ServerNode (const ServerNode &other, ComposedNode *father) | |
| void | accept (Visitor *visitor) |
| bool | isDeployable () const |
| By definition of ServerNode class. More... | |
| virtual | ~ServerNode () |
| Public Member Functions inherited from YACS::ENGINE::InlineFuncNode | |
| virtual void | setFname (const std::string &fname) |
| Set the function name to use in node execution. More... | |
| virtual std::string | getFname () |
| virtual | ~InlineFuncNode () |
| virtual void | checkBasicConsistency () const throw (Exception) |
| Public Member Functions inherited from YACS::ENGINE::InlineNode | |
| virtual void | setScript (const std::string &script) |
| Set the script (as a string) to execute. More... | |
| virtual std::string | getScript () |
| virtual InlineNode * | cloneNode (const std::string &name) |
| Return a new InlineNode node by making a copy of this node. More... | |
| virtual | ~InlineNode () |
| virtual void | setExecutionMode (const std::string &mode) |
| virtual std::string | getExecutionMode () |
| virtual void | setContainer (Container *container) |
| virtual Container * | getContainer () |
| void | performDuplicationOfPlacement (const Node &other) |
| performs a duplication of placement using clone method of containers and components. clone behaviour is driven by attachOnCloning attribute. More... | |
| void | performShallowDuplicationOfPlacement (const Node &other) |
| performs a also duplication of placement but here containers and components are not copied at all whatever the value of attachedOnCloning. More... | |
| int | getMaxLevelOfParallelism () const |
| Public Member Functions inherited from YACS::ENGINE::ElementaryNode | |
| virtual | ~ElementaryNode () |
| void | exUpdateState () |
| Update the node state. More... | |
| void | init (bool start=true) |
| ComponentInstance * | getComponent () |
| const ComponentInstance * | getComponent () const |
| YACS::StatesForNode | getState () const |
| void | getReadyTasks (std::vector< Task * > &tasks) |
| void | edRemovePort (Port *port) throw (Exception) |
| std::list< ElementaryNode * > | getRecursiveConstituents () const |
| std::list< ProgressWeight > | getProgressWeight () const |
| Get the progress weight for all elementary nodes. More... | |
| Node * | getChildByName (const std::string &name) const throw (Exception) |
| ComposedNode * | getDynClonerIfExists (const ComposedNode *levelToStop) const |
| int | getNumberOfInputPorts () const |
| int | getNumberOfOutputPorts () const |
| std::string | getInPortName (const InPort *) const throw (Exception) |
| std::string | getOutPortName (const OutPort *) const throw (Exception) |
| InputPort * | getInputPort (const std::string &name) const throw (Exception) |
| OutputPort * | getOutputPort (const std::string &name) const throw (Exception) |
| std::list< InputPort * > | getSetOfInputPort () const |
| std::list< OutputPort * > | getSetOfOutputPort () const |
| std::list< InputPort * > | getLocalInputPorts () const |
| std::list< OutputPort * > | getLocalOutputPorts () const |
| std::set< OutPort * > | getAllOutPortsLeavingCurrentScope () const |
| std::set< InPort * > | getAllInPortsComingFromOutsideOfCurrentScope () const |
| virtual std::vector< std::pair < OutPort *, InPort * > > | getSetOfLinksLeavingCurrentScope () const |
| virtual std::vector< std::pair < InPort *, OutPort * > > | getSetOfLinksComingInCurrentScope () const |
| std::list< InputDataStreamPort * > | getSetOfInputDataStreamPort () const |
| std::list< OutputDataStreamPort * > | getSetOfOutputDataStreamPort () const |
| InputDataStreamPort * | getInputDataStreamPort (const std::string &name) const throw (Exception) |
| OutputDataStreamPort * | getOutputDataStreamPort (const std::string &name) const throw (Exception) |
| virtual InputPort * | createInputPort (const std::string &inputPortName, TypeCode *type) |
| virtual OutputPort * | createOutputPort (const std::string &outputPortName, TypeCode *type) |
| virtual InputDataStreamPort * | createInputDataStreamPort (const std::string &inputPortDSName, TypeCode *type) |
| virtual OutputDataStreamPort * | createOutputDataStreamPort (const std::string &outputPortDSName, TypeCode *type) |
| virtual InputPort * | edAddInputPort (const std::string &inputPortName, TypeCode *type) throw (Exception) |
| virtual OutputPort * | edAddOutputPort (const std::string &outputPortName, TypeCode *type) throw (Exception) |
| virtual InputDataStreamPort * | edAddInputDataStreamPort (const std::string &inputPortDSName, TypeCode *type) throw (Exception) |
| virtual OutputDataStreamPort * | edAddOutputDataStreamPort (const std::string &outputPortDSName, TypeCode *type) throw (Exception) |
| virtual void | edOrderInputPorts (const std::list< InputPort * > &ports) |
| virtual void | edOrderOutputPorts (const std::list< OutputPort * > &ports) |
| virtual void | edUpdateState () |
| update the status of the node More... | |
| virtual void | ensureLoading () |
| Put this node into TOLOAD state when possible. More... | |
| void | begin () |
| bool | isReady () |
| void | finished () |
| void | aborted () |
| void | loaded () |
| Notify this node that it is loaded. More... | |
| void | connected () |
| Notify this node that it is connected. More... | |
| virtual std::string | getErrorDetails () |
| Give a description of error when node status is ERROR. More... | |
| virtual void | initService () |
| virtual void | connectService () |
| virtual void | disconnectService () |
| virtual void | getCoupledTasks (std::set< Task * > &coupledSet) |
| Calls getCoupledNodes for Task interface. More... | |
| virtual void | getCoupledNodes (std::set< Task * > &coupledSet) |
| Put all nodes that are coupled to this node in coupledSet. More... | |
| virtual void | addDatastreamPortToInitMultiService (const std::string &port_name, int number) |
| template<class PORT > | |
| void | edRemovePortTypedFromSet (PORT *port, std::list< PORT * > &setOfPorts) throw (Exception) |
| template<class PORT > | |
| bool | isPortNameAlreadyExist (const std::string &portName, const std::list< PORT * > &setOfPorts) |
| Public Member Functions inherited from YACS::ENGINE::Node | |
| virtual | ~Node () |
| virtual void | shutdown (int level) |
| Stop all pending activities of the node. More... | |
| virtual void | resetState (int level) |
| Reset the node state depending on the parameter level. More... | |
| Node * | clone (ComposedNode *father, bool editionOnly=true) const |
| This method MUST NEVER BE VIRTUAL More... | |
| Node * | cloneWithoutCompAndContDeepCpy (ComposedNode *father, bool editionOnly=true) const |
| This method MUST NEVER BE VIRTUAL More... | |
| void | setState (YACS::StatesForNode theState) |
| Sets the given state for node. More... | |
| virtual YACS::StatesForNode | getEffectiveState () const |
| Return the node state in the context of its father. More... | |
| virtual YACS::StatesForNode | getEffectiveState (const Node *) const |
| Return the effective state of a node in the context of this one (its father) More... | |
| std::string | getColorState (YACS::StatesForNode state) const |
| Return the color associated to a state. More... | |
| InGate * | getInGate () |
| OutGate * | getOutGate () |
| const std::string & | getName () const |
| void | setName (const std::string &name) |
| Change the name of the node. More... | |
| ComposedNode * | getFather () const |
| const std::string | getId () const |
| bool | exIsControlReady () const |
| std::list< Node * > | getOutNodes () const |
| virtual void | writeDot (std::ostream &os) const |
| Dump to the input stream a dot representation of the node. More... | |
| virtual void | exFailedState () |
| Notify this node that its execution has failed. More... | |
| virtual void | exDisabledState () |
| Notify this node that it has been disabled. More... | |
| std::list< InPort * > | getSetOfInPort () const |
| std::list< OutPort * > | getSetOfOutPort () const |
| virtual std::set< InputPort * > | edGetSetOfUnitializedInputPort () const |
| Becomes deprecated soon. Replaced by ComposedNode::CheckConsistency. More... | |
| virtual bool | edAreAllInputPortInitialized () const |
| Becomes deprecated soon. Replaced by ComposedNode::CheckConsistency. More... | |
| InPort * | getInPort (const std::string &name) const throw (Exception) |
| InPropertyPort * | getInPropertyPort () const throw (Exception) |
| virtual OutPort * | getOutPort (const std::string &name) const throw (Exception) |
| std::list< ComposedNode * > | getAllAscendanceOf (ComposedNode *levelToStop=0) const |
| bool | operator> (const Node &other) const |
| bool | operator< (const Node &other) const |
| std::string | getImplementation () const |
| virtual ComposedNode * | getRootNode () const throw (Exception) |
| virtual void | setProperty (const std::string &name, const std::string &value) |
| virtual std::string | getProperty (const std::string &name) |
| std::map< std::string, std::string > | getProperties () |
| std::map< std::string, std::string > | getPropertyMap () |
| virtual void | setProperties (std::map< std::string, std::string > properties) |
| virtual Proc * | getProc () |
| virtual const Proc * | getProc () const |
| std::string | getQualifiedName () const |
| same as Node::getName() in most cases, but differs for children of switch More... | |
| int | getNumId () |
| return node instance identifiant, unique for each node instance More... | |
| std::vector< std::pair < std::string, int > > | getDPLScopeInfo (ComposedNode *gfn) |
| virtual void | applyDPLScope (ComposedNode *gfn) |
| virtual void | sendEvent (const std::string &event) |
| emit notification to all observers registered with the dispatcher More... | |
| virtual void | sendEvent2 (const std::string &event, void *something) |
| emit notification to all observers registered with the dispatcher More... | |
| virtual std::string | getErrorDetails () const |
| virtual void | setErrorDetails (const std::string &error) |
| virtual void | modified () |
| Sets Node in modified state and its father if it exists. More... | |
| virtual int | isModified () |
| virtual int | isValid () |
| indicates if the node is valid (returns 1) or not (returns 0) More... | |
| virtual std::string | getErrorReport () |
| returns a string that contains an error report if the node is in error More... | |
| virtual std::string | getContainerLog () |
| returns a string that contains the name of the container log file if it exists More... | |
| virtual void | cleanNodes () |
| Clean the node in case of not clean exit. More... | |
| Public Member Functions inherited from YACS::ENGINE::Task | |
| virtual | ~Task () |
Static Public Attributes | |
| static const char | KIND [] ="DistPython" |
| static const char | IMPL_NAME [] ="Python" |
| static const char | SALOME_CONTAINER_METHOD_IDL [] ="createPyNode" |
Protected Member Functions | |
| Node * | simpleClone (ComposedNode *father, bool editionOnly) const |
Protected Attributes | |
| PyObject * | _context |
| PyObject * | _pyfuncSer |
| PyObject * | _pyfuncUnser |
| Engines::PyNode_var | _pynode |
Private Member Functions | |
| void | initMySelf () |
| void | dealException (CORBA::Exception *exc, const char *method, const char *ref) |
Additional Inherited Members | |
| Static Public Member Functions inherited from YACS::ENGINE::Node | |
| static std::string | getStateName (YACS::StatesForNode state) |
| Return the name of a state. More... | |
| Public Attributes inherited from YACS::ENGINE::Node | |
| YACS::Colour | _colour |
| Static Protected Member Functions inherited from YACS::ENGINE::ElementaryNode | |
| template<class PORT > | |
| static void | edRemovePortTypedFromSet (PORT *port, std::list< PORT * > &setOfPorts) throw (Exception) |
| template<class PORT > | |
| static bool | isPortNameAlreadyExist (const std::string &portName, const std::list< PORT * > &setOfPorts) |
| Static Protected Attributes inherited from YACS::ENGINE::Node | |
| static const char | SEP_CHAR_IN_PORT [] ="." |
| static int | _total = 0 |
Detailed Description
Definition at line 44 of file DistributedPythonNode.hxx.
Constructor & Destructor Documentation
| DistributedPythonNode::DistributedPythonNode | ( | const std::string & | name | ) |
Definition at line 44 of file DistributedPythonNode.cxx.
References initMySelf().
Referenced by createNode().
| DistributedPythonNode::DistributedPythonNode | ( | const DistributedPythonNode & | other, |
| ComposedNode * | father | ||
| ) |
Definition at line 49 of file DistributedPythonNode.cxx.
References initMySelf().
| DistributedPythonNode::~DistributedPythonNode | ( | ) |
Definition at line 54 of file DistributedPythonNode.cxx.
References _context.
Member Function Documentation
|
virtual |
Implements YACS::ENGINE::ServerNode.
Definition at line 270 of file DistributedPythonNode.cxx.
References YACS::ENGINE::InlineNode::_container, DistributedPythonNode(), PMMLBasicsTestLauncher::ret, and YACS::ENGINE::InlineNode::setContainer().
|
private |
Definition at line 284 of file DistributedPythonNode.cxx.
References YACS::ENGINE::Node::_errorDetails, DEBTRACE, and YACS::ENGINE::ElementaryNode::getErrorDetails().
|
virtual |
Implements YACS::ENGINE::Task.
Definition at line 161 of file DistributedPythonNode.cxx.
References YACS::ENGINE::Node::_errorDetails, _pyfuncSer, _pyfuncUnser, _pynode, YACS::ENGINE::ElementaryNode::_setOfInputPort, YACS::ENGINE::ElementaryNode::_setOfOutputPort, DEBTRACE, YACS::ENGINE::DataPort::edGetType(), YACS::ENGINE::InlineFuncNode::getFname(), YACS::ENGINE::DataPort::getName(), YACS::ENGINE::Node::getName(), YACS::ENGINE::ElementaryNode::getNumberOfInputPorts(), YACS::ENGINE::ElementaryNode::getNumberOfOutputPorts(), YACS::ENGINE::InputPyPort::getPyObj(), CORBAEngineTest::i, YACS::ENGINE::TypeCode::kind(), p, YACS::ENGINE::OutputPyPort::put(), YACS::Exception::what(), and YACSTRACE.
|
virtual |
this method returns the type of container expected
Implements YACS::ENGINE::ServerNode.
Definition at line 259 of file DistributedPythonNode.cxx.
| std::string DistributedPythonNode::getKind | ( | ) | const |
this method returns the type of input/output expected
not a bug : this is to use classical python port translators.
Definition at line 264 of file DistributedPythonNode.cxx.
References YACS::ENGINE::PythonNode::KIND.
|
private |
Definition at line 277 of file DistributedPythonNode.cxx.
References _context, YACS::ENGINE::Node::_implementation, and IMPL_NAME.
Referenced by DistributedPythonNode().
|
virtual |
Reimplemented from YACS::ENGINE::ServerNode.
Definition at line 60 of file DistributedPythonNode.cxx.
References YACS::ENGINE::InlineNode::_container, _context, YACS::ENGINE::Node::_errorDetails, _pyfuncSer, _pyfuncUnser, _pynode, YACS::ENGINE::SalomeContainerTmpForHP::BuildFrom(), DEBTRACE, YACS::ENGINE::SalomeContainer::getContainerPtr(), YACS::ENGINE::Node::getName(), YACS::ENGINE::getSALOMERuntime(), YACS::ENGINE::InlineNode::getScript(), YACS::ENGINE::Container::isAlreadyStarted(), YACS::ENGINE::ServerNode::load(), and YACS::ENGINE::newPyStdOut().
|
protectedvirtual |
Implements YACS::ENGINE::Node.
Definition at line 39 of file DistributedPythonNode.cxx.
|
inlinevirtual |
Reimplemented from YACS::ENGINE::ServerNode.
Definition at line 59 of file DistributedPythonNode.hxx.
Member Data Documentation
|
protected |
Definition at line 68 of file DistributedPythonNode.hxx.
Referenced by initMySelf(), load(), and ~DistributedPythonNode().
|
protected |
Definition at line 69 of file DistributedPythonNode.hxx.
|
protected |
Definition at line 70 of file DistributedPythonNode.hxx.
|
protected |
Definition at line 71 of file DistributedPythonNode.hxx.
|
static |
Definition at line 65 of file DistributedPythonNode.hxx.
Referenced by initMySelf().
|
static |
Definition at line 64 of file DistributedPythonNode.hxx.
|
static |
Definition at line 66 of file DistributedPythonNode.hxx.
The documentation for this class was generated from the following files:
- src/runtime/DistributedPythonNode.hxx
- src/runtime/DistributedPythonNode.cxx