Version: 8.3.0
For a detailed description of the Partition operation please refer to this document. It provides a general review of the Partition and Boolean operations algorithms, describes the usage methodology and highlights major limitations of these operations.
Perhaps you also ask yourself : What's the difference between partition, compounds and fuse operation?
To produce a Partition in the Main Menu select Operations -> Partition
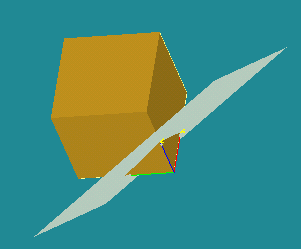
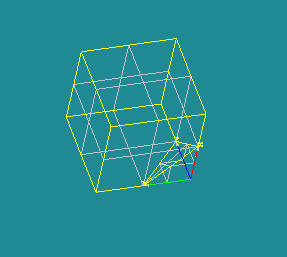
This operation builds a compound by partitioning a set of input objects by a set of tool objects.
The Result of the operation is a GEOM_Object.
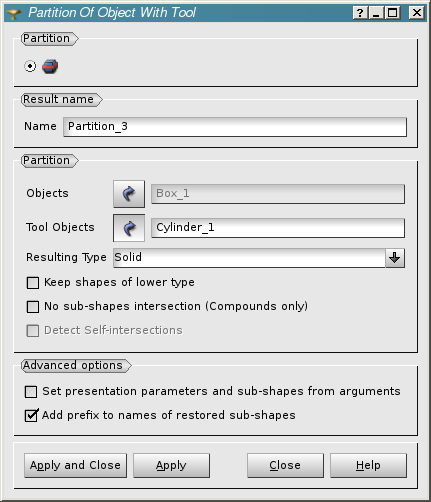
Arguments: Name + 2 lists of shapes (the shapes from the first list will be intersected with the shapes from the second list) + Resulting Type of shape.
As far as the partition of two objects can produce any type of geometrical objects, Resulting type box allows choosing the preferable result, i.e. a solid, a shell, a list of faces, etc.
The Resulting type has to be equal or lower than the type of the Objects. In other words, if the Objects don't contain any shape of this type, Partition fails.
Keep shapes of lower type checkbox manages standalone shapes of type other than the Limit. If it is checked, lower dimension objects will be preserved, else they will be lost.
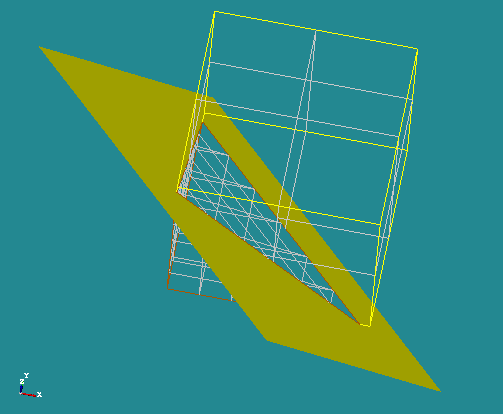
For example, you partition a box (Solid) and a face (Face) without any tool (the box is split in two parts by the shape). If you choose the Resulting Type "Solid", you will obtain a compound of two solids, but if you also check Keep shapes of lower type checkbox, you will obtain a compound of two solids and one face (there will be a hole in the resulting face, where the original face intersects with the box, see the corresponding picture below).
No sub-shapes intersection (Compounds only) check box affects only input shapes of the Compound type.
Detect Self-intersections check box is used to check self-intersection of arguments. It is enabled only if No sub-shapes intersection (Compounds only) is checked.
TUI Command (with sub-shapes intersection):
geompy.MakePartition(ListOfShapes, ListOfTools, ListOfKeepInside, ListOfRemoveInside, Limit, RemoveWebs, ListOfMaterials, KeepNonlimitShapes)
TUI Command (without sub-shapes intersection):
geompy.MakePartitionNonSelfIntersectedShape(ListOfShapes, ListOfTools, ListOfKeepInside, ListOfRemoveInside, Limit, RemoveWebs, ListOfMaterials, KeepNonlimitShapes, checkSelfInte)
Here,
Examples:
Our TUI Scripts provide you with useful examples of Basic Operations.

