CORBAPorts.hxx File Reference
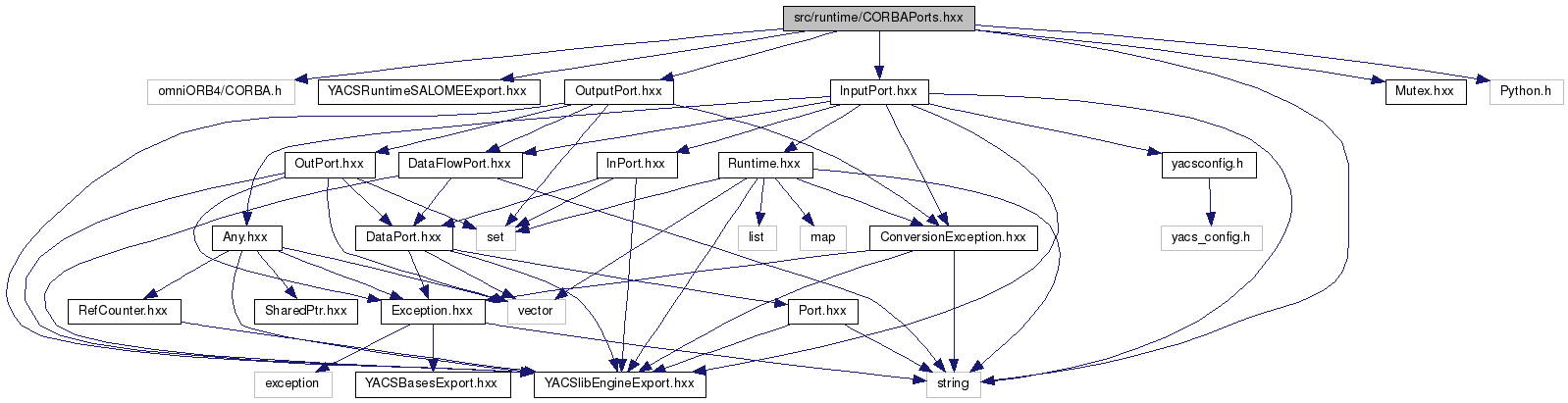
#include <omniORB4/CORBA.h>#include "YACSRuntimeSALOMEExport.hxx"#include "InputPort.hxx"#include "OutputPort.hxx"#include "Mutex.hxx"#include <Python.h>#include <string>
Include dependency graph for CORBAPorts.hxx:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | YACS::ENGINE::InputCorbaPort |
| Class for CORBA Input Ports. More... | |
| class | YACS::ENGINE::OutputCorbaPort |
Namespaces | |
| namespace | YACS |
| namespace | YACS::ENGINE |
Functions | |
| YACSRUNTIMESALOME_EXPORT std::ostream & | YACS::ENGINE::operator<< (std::ostream &os, const YACS::ENGINE::OutputCorbaPort &p) |