Version: 8.3.0
Like other intersectors the aim of this intersector is to compute intersection between 2 polygons.
The specificity of this intersector is to deal with any type of polygons even those with quadratic edges. Its quite generic architecture allows him to deal with some other potentially useful functions.
This page described Geometric2D intersector basic principles and specific usage.
The principle used in this intersector to perform boolean operation on geometry is geometric-modeler like. The data structure used to describe polygons is boundary description. That is to say the internal representation of a polygon is its edges composing it.
Consecutive means that in a composed edge if edge e2 follows edge e1, the end node of e1 is geometrically equal to start node of e2.
A quadratic polygon is a specialization of a composed edge in that it is closed. Closed means that the start node of first edge is equal to end node of last edge.
A composed edge is considered as a collection of abstract edges. An abstract edge is either an elementary edge or itself a composed edge.
A composite pattern has been used here.
Each elementary edge and each nodes have a flag that states if during the split process if it is out, on, in or unknown.
The boolean operation (intersection) between two polygons is used in P0 P0 interpolation.
The process of boolean operations between two polygons P1 and P2 is done in three steps :
The principle used to do boolean operations between 2 polygons P1 and P2 is to intersect each edge of P1 with each edge of P2.
After this edge-splitting, polygon P1 is splitted, so that each elementary edge constituting P1 is either in, out or on polygon P2. And inversely, polygon P2 is splitted so that each elementary edge constituting P2 is either in, out or on polygon P1.
During split process, when, without any CPU overhead, the location can be deduced, the nodes and edges are localized.
This step of splitting is common to all boolean operations.
The method in charge of that is INTERP_KERNEL::QuadraticPolygon::splitPolygonsEachOther.
Perform localization of each splitted edge. As split process it is common to all boolean operations.
When the location of edges has not been already deduced in previous computation and there is no predecessor, the localization is done in absolute. After it deduces the localization relatively to the previous edge thanks to node localization.
The relative localization is done following these rules :
| Previous Edge Loc | Current start node Loc | Current edge Loc |
| UNKNOWN | ANY | UNKNOWN -> Absolute search |
| OUT | ON | IN |
| OUT | ON_TANGENT | OUT |
| IN | ON | OUT |
| IN | ON_TANGENT | IN |
| OUT | OUT | OUT |
| IN | IN | IN |
| ON | ANY | UNKNOWN -> Absolute search |
The method in charge of that is INTERP_KERNEL::QuadraticPolygon::performLocatingOperation.
This stage links each edge with wanted loc. Contrary to last 2 steps it is obviously boolean operation dependant. Let's take the case of the intersection that is used in P0->P0 interpolation.
The principle of result polygon building is to build polygon by taking edges localized as in or on.
Generally, the principle is to take an edge in P1 with wanted loc and linking direct neighbour-edges (with correct loc) until closing a polygon. If not, using P2 edges to try to close polygon. The process is repeated until all edges with correct loc have been consumed.
The method in charge of that is INTERP_KERNEL::QuadraticPolygon::buildIntersectionPolygons.
This algorithm is called when splitting process has been done, and that we are sure that the edge is either fully in ,or fully on or fully out.
The principle chosen to know if an edge E is completely included in an any polygon P is to see if its barycenter B is inside this any polygon P. After, for each nodes  of polygon P we store angle in
of polygon P we store angle in ![$ [-\pi/2,\pi/2 ] $](form_4.png) that represents the slope of line
that represents the slope of line  .
.
Then a line L going through B with a slope being as far as possible from all slopes found above. Then the algorithm goes along L and number of times N it intersects non-tangentially the any polygon P.
If N is odd B (and then E) is IN. If N is even B (and then E) is OUT.
This computation is very expensive, that why some tricks as described in localization techniques are used to call as few as possible during intersecting process.
The only mathematical intersections performed are edges intersections. The algorithms used are :
As internal architecture is quite general, it is possible to have more than classical intersection on any polygons :
This intersector is usable standalone. To use a set of user friendly methods have been implemented.
std::vector of INTERP_KERNEL::Node* V, an instance of QuadraticPolygon P. P will have  edges. Quadratic edge
edges. Quadratic edge ![$ Edge_i i \in [0,N_{edges}-1] $](form_7.png) starts with node V[i], ends with node V[i+1] and has a middle in
starts with node V[i], ends with node V[i+1] and has a middle in ![$ V[i+N_{edge}] $](form_8.png) .
.  are aligned by a precision specified by INTERP_KERNEL::QUADRATIC_PLANAR::setArcDetectionPrecision.
are aligned by a precision specified by INTERP_KERNEL::QUADRATIC_PLANAR::setArcDetectionPrecision.std::vector of INTERP_KERNEL::Node* V, an instance of QuadraticPolygon P. P will have  edges. Linear edge starts with node V[i] and ends with node V[i+1].
edges. Linear edge starts with node V[i] and ends with node V[i+1].The orientation of polygons (clockwise, inverse clockwise) impact computation only on the sign of areas. During intersection of 2 polygons their orientation can be different.
The usage is simple :
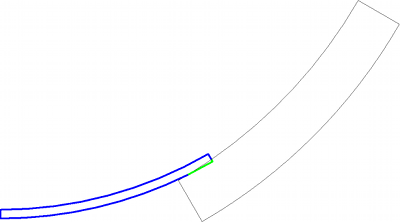
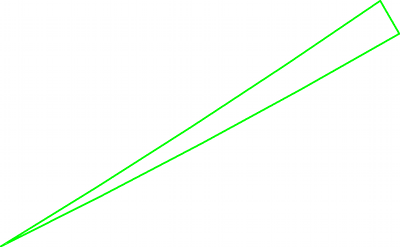
Here an example of 2 polygons. The left one P1 has 4 edges and the right one P2 has 4 edges too.

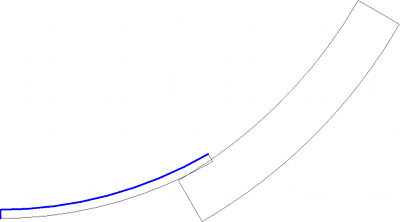
For each 6 edges locate them.