
| Version 4 (modified by , 13 years ago) (diff) |
|---|
Komolec
 Na primeru komolca bomo pokazali osnovne operacije in gradnjo modela s PythonOcc
za postavitev v globalnem koordinatnem sistemu podanem s tremi točkami:
Na primeru komolca bomo pokazali osnovne operacije in gradnjo modela s PythonOcc
za postavitev v globalnem koordinatnem sistemu podanem s tremi točkami:
- p0 - središče komolca
- p1 - točka ki podaja os axis1 iz središča p0
- p2 - točka za drugo os axis2 iz središča p0
Cilj takega podajanja položaja je, da se poenostavi orientacijo in s tem tudi
gradnjo sestavov iz tega in podobnih členkov.
Model na skici  naj bi omogočal tudi enostavno
gradnjo sestavov.
naj bi omogočal tudi enostavno
gradnjo sestavov.
Poleg globalnega določanja položaja želimo nadzorovati tudi stopnjo izdelave podrobnosti, saj se nekateri detajli ne potrebujejo za vse namene. Poglaviten namen je predvsem prikaz v sestavu. Takrat nahko zmanjšamo podrobnosti zaokrožitev in notranjosti.
Pričnemo z manjšim programom na katerega bomo postopoma dograjevali model.
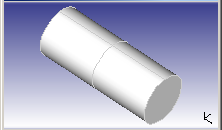
Kot osnovo vzamemo program s cilindrom. 
from OCC.Display.SimpleGui import * from OCC.BRepPrimAPI import * R = 30 L = 150 myPrim1 = BRepPrimAPI_MakeCylinder(R, L) (display, start_display, add_menu, add_function_to_menu) = init_display() display.DisplayShape(myPrim1.Shape()) start_display()
Attachments (16)
-
coord-sys.svg (6.8 KB) - added by 13 years ago.
Koordinatni sistem
-
elbow1.png (7.9 KB) - added by 13 years ago.
Osnutek
-
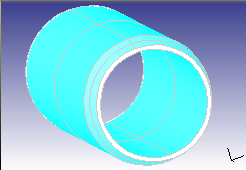
elbow2.png (5.1 KB) - added by 13 years ago.
Srebren model
-
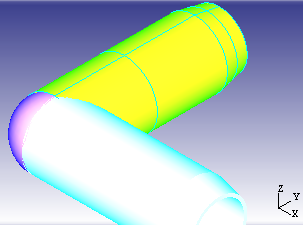
elbow3.png (7.4 KB) - added by 13 years ago.
Chamfer
-
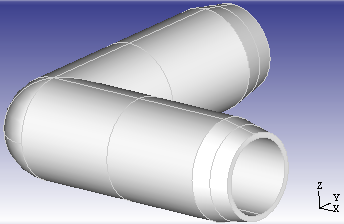
elbow4.png (9.6 KB) - added by 13 years ago.
Cut
- elbow5.png (18.0 KB) - added by 13 years ago.
-
elbow6.png (21.9 KB) - added by 13 years ago.
Končni kos
-
jsc3d.touch.js (46.0 KB) - added by 13 years ago.
Pomožni program za tablice
-
jsc3d.min.js (61.6 KB) - added by 13 years ago.
Minimizirana knjižnica jsc3d
-
elbow.svg (14.7 KB) - added by 13 years ago.
Skica kolena
-
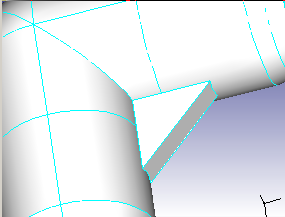
elbow7.png (8.7 KB) - added by 13 years ago.
Rebro
-
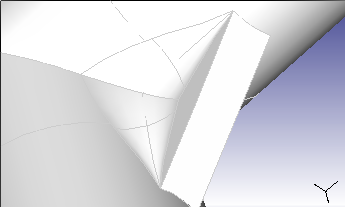
elbow8.png (10.5 KB) - added by 13 years ago.
Zaokrožitev
-
elbow.py (2.9 KB) - added by 13 years ago.
Končnni program
-
elbow.stl (206.5 KB) - added by 13 years ago.
Shranjena binarna datoteka komolca v obliki STL
-
pipe.stl (5.0 KB) - added by 13 years ago.
Cev premera 50mm in dolžine 500mm
-
Grass_by_jaqx_textures.jpg (274.8 KB) - added by 13 years ago.
Trava s strani http://jaqx-textures.deviantart.com/
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Download all attachments as: .zip