
| Version 3 (modified by , 13 years ago) (diff) |
|---|
Komolec
 Na primeru komolca bomo pokazali osnovne operacije in gradnjo modela s PythonOcc
za postavitev v globalnem koordinatnem sistemu podanem s tremi točkami:
Na primeru komolca bomo pokazali osnovne operacije in gradnjo modela s PythonOcc
za postavitev v globalnem koordinatnem sistemu podanem s tremi točkami:
- p0 - središče komolca
- p1 - točka ki podaja os axis1 iz središča p0
- p2 - točka za drugo os axis2 iz središča p0
Cilj takega podajanja položaja je, da se poenostavi orientacijo in s tem tudi
gradnjo sestavov iz tega in podobnih členkov.
Model na skici  naj bi omogočal tudi enostavno
gradnjo sestavov.
naj bi omogočal tudi enostavno
gradnjo sestavov.
Attachments (16)
-
coord-sys.svg (6.8 KB) - added by 13 years ago.
Koordinatni sistem
-
elbow1.png (7.9 KB) - added by 13 years ago.
Osnutek
-
elbow2.png (5.1 KB) - added by 13 years ago.
Srebren model
-
elbow3.png (7.4 KB) - added by 13 years ago.
Chamfer
-
elbow4.png (9.6 KB) - added by 13 years ago.
Cut
- elbow5.png (18.0 KB) - added by 13 years ago.
-
elbow6.png (21.9 KB) - added by 13 years ago.
Končni kos
-
jsc3d.touch.js (46.0 KB) - added by 13 years ago.
Pomožni program za tablice
-
jsc3d.min.js (61.6 KB) - added by 13 years ago.
Minimizirana knjižnica jsc3d
-
elbow.svg (14.7 KB) - added by 13 years ago.
Skica kolena
-
elbow7.png (8.7 KB) - added by 13 years ago.
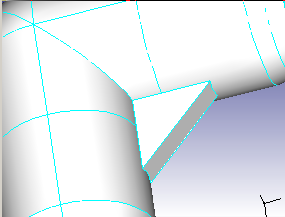
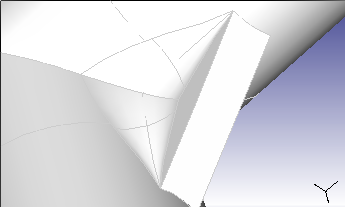
Rebro
-
elbow8.png (10.5 KB) - added by 13 years ago.
Zaokrožitev
-
elbow.py (2.9 KB) - added by 13 years ago.
Končnni program
-
elbow.stl (206.5 KB) - added by 13 years ago.
Shranjena binarna datoteka komolca v obliki STL
-
pipe.stl (5.0 KB) - added by 13 years ago.
Cev premera 50mm in dolžine 500mm
-
Grass_by_jaqx_textures.jpg (274.8 KB) - added by 13 years ago.
Trava s strani http://jaqx-textures.deviantart.com/
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Download all attachments as: .zip